കൃത്യമായ പോസ്റ്റുകൾക്കായി ഞങ്ങളുടെ സോഷ്യൽ മീഡിയ സബ്സ്ക്രൈബ് ചെയ്യുക
റിംഗ് ലേസർ ഗൈറോസ്കോപ്പുകൾ (RLG-കൾ) അവയുടെ തുടക്കം മുതൽ ഗണ്യമായി മുന്നേറിയിട്ടുണ്ട്, ആധുനിക നാവിഗേഷനിലും ഗതാഗത സംവിധാനങ്ങളിലും നിർണായക പങ്ക് വഹിക്കുന്നു. ഈ ലേഖനം RLG-കളുടെ വികസനം, തത്വം, പ്രയോഗങ്ങൾ എന്നിവയിലേക്ക് ആഴ്ന്നിറങ്ങുന്നു, ഇനേർഷ്യൽ നാവിഗേഷൻ സിസ്റ്റങ്ങളിൽ അവയുടെ പ്രാധാന്യവും വിവിധ ഗതാഗത സംവിധാനങ്ങളിൽ അവയുടെ ഉപയോഗവും എടുത്തുകാണിക്കുന്നു.
ഗൈറോസ്കോപ്പുകളുടെ ചരിത്ര യാത്ര
ആശയം മുതൽ ആധുനിക നാവിഗേഷൻ വരെ
1908-ൽ "ആധുനിക നാവിഗേഷൻ സാങ്കേതികവിദ്യയുടെ പിതാവ്" എന്നറിയപ്പെടുന്ന എൽമർ സ്പെറിയും ഹെർമൻ അൻഷൂട്ട്സ്-കെംഫെയും ചേർന്ന് ആദ്യത്തെ ഗൈറോകോംപാസ് കണ്ടുപിടിച്ചതോടെയാണ് ഗൈറോസ്കോപ്പുകളുടെ യാത്ര ആരംഭിച്ചത്. കാലക്രമേണ, ഗൈറോസ്കോപ്പുകൾ ഗണ്യമായ പുരോഗതി കൈവരിച്ചു, നാവിഗേഷനിലും ഗതാഗതത്തിലും അവയുടെ ഉപയോഗക്ഷമത വർദ്ധിപ്പിച്ചു. വിമാന പറക്കലുകൾ സ്ഥിരപ്പെടുത്തുന്നതിനും ഓട്ടോപൈലറ്റ് പ്രവർത്തനങ്ങൾ പ്രാപ്തമാക്കുന്നതിനും നിർണായകമായ മാർഗ്ഗനിർദ്ദേശം നൽകാൻ ഈ പുരോഗതി ഗൈറോസ്കോപ്പുകളെ പ്രാപ്തമാക്കി. 1914 ജൂണിൽ ലോറൻസ് സ്പെറി നടത്തിയ ശ്രദ്ധേയമായ ഒരു പ്രകടനം, കോക്ക്പിറ്റിൽ നിൽക്കുമ്പോൾ ഒരു വിമാനം സ്ഥിരപ്പെടുത്തുന്നതിലൂടെ ഗൈറോസ്കോപ്പിക് ഓട്ടോപൈലറ്റിന്റെ സാധ്യതകൾ പ്രദർശിപ്പിച്ചു, ഇത് ഓട്ടോപൈലറ്റ് സാങ്കേതികവിദ്യയിൽ ഒരു പ്രധാന കുതിച്ചുചാട്ടം അടയാളപ്പെടുത്തി.
റിംഗ് ലേസർ ഗൈറോസ്കോപ്പുകളിലേക്കുള്ള മാറ്റം
1963-ൽ മാസെക്കും ഡേവിസും ചേർന്ന് ആദ്യത്തെ റിംഗ് ലേസർ ഗൈറോസ്കോപ്പ് കണ്ടുപിടിച്ചതോടെ പരിണാമം തുടർന്നു. ഉയർന്ന കൃത്യത, കുറഞ്ഞ അറ്റകുറ്റപ്പണി, കുറഞ്ഞ ചെലവ് എന്നിവ വാഗ്ദാനം ചെയ്യുന്ന മെക്കാനിക്കൽ ഗൈറോസ്കോപ്പുകളിൽ നിന്ന് ലേസർ ഗൈറോകളിലേക്കുള്ള മാറ്റത്തെ ഈ നവീകരണം അടയാളപ്പെടുത്തി. ഇന്ന്, റിംഗ് ലേസർ ഗൈറോകൾ, പ്രത്യേകിച്ച് സൈനിക ആപ്ലിക്കേഷനുകളിൽ, ജിപിഎസ് സിഗ്നലുകൾ അപഹരിക്കപ്പെട്ട പരിതസ്ഥിതികളിലെ അവയുടെ വിശ്വാസ്യതയും കാര്യക്ഷമതയും കാരണം വിപണിയിൽ ആധിപത്യം സ്ഥാപിക്കുന്നു.
റിംഗ് ലേസർ ഗൈറോസ്കോപ്പുകളുടെ തത്വം
സാഗ്നാക് പ്രഭാവം മനസ്സിലാക്കുന്നു
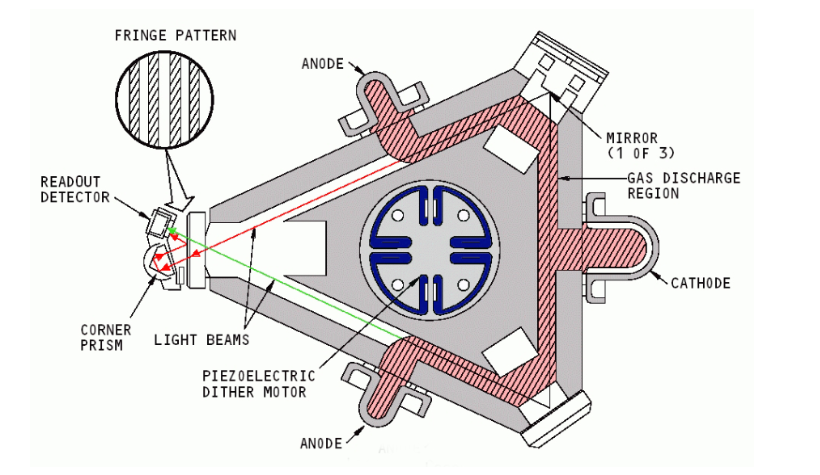
RLG-കളുടെ പ്രധാന പ്രവർത്തനം, ഇനേർഷ്യൽ സ്പെയ്സിൽ ഒരു വസ്തുവിന്റെ ഓറിയന്റേഷൻ നിർണ്ണയിക്കാനുള്ള കഴിവിലാണ്. സാഗ്നാക് ഇഫക്റ്റ് വഴിയാണ് ഇത് കൈവരിക്കുന്നത്, അവിടെ ഒരു റിംഗ് ഇന്റർഫെറോമീറ്റർ ഒരു അടഞ്ഞ പാതയ്ക്ക് ചുറ്റും വിപരീത ദിശകളിലേക്ക് സഞ്ചരിക്കുന്ന ലേസർ ബീമുകൾ ഉപയോഗിക്കുന്നു. ഈ ബീമുകൾ സൃഷ്ടിക്കുന്ന ഇന്റർഫെറൻസ് പാറ്റേൺ ഒരു സ്റ്റേഷണറി റഫറൻസ് പോയിന്റായി പ്രവർത്തിക്കുന്നു. ഏതൊരു ചലനവും ഈ ബീമുകളുടെ പാത ദൈർഘ്യത്തിൽ മാറ്റം വരുത്തുന്നു, ഇത് കോണീയ പ്രവേഗത്തിന് ആനുപാതികമായി ഇന്റർഫെറൻസ് പാറ്റേണിൽ മാറ്റത്തിന് കാരണമാകുന്നു. ബാഹ്യ റഫറൻസുകളെ ആശ്രയിക്കാതെ അസാധാരണമായ കൃത്യതയോടെ ഓറിയന്റേഷൻ അളക്കാൻ ഈ സമർത്ഥമായ രീതി RLG-കളെ അനുവദിക്കുന്നു.
നാവിഗേഷനിലും ഗതാഗതത്തിലും ആപ്ലിക്കേഷനുകൾ
വിപ്ലവകരമായ ഇനേർഷ്യൽ നാവിഗേഷൻ സിസ്റ്റങ്ങൾ (INS)
ജിപിഎസ്-നിഷേധിത പരിതസ്ഥിതികളിൽ കപ്പലുകൾ, വിമാനങ്ങൾ, മിസൈലുകൾ എന്നിവയെ നയിക്കുന്നതിന് നിർണായകമായ ഇനേർഷ്യൽ നാവിഗേഷൻ സിസ്റ്റങ്ങളുടെ (ഐഎൻഎസ്) വികസനത്തിൽ ആർഎൽജികൾ നിർണായക പങ്ക് വഹിക്കുന്നു. അവയുടെ ഒതുക്കമുള്ളതും ഘർഷണരഹിതവുമായ രൂപകൽപ്പന അത്തരം ആപ്ലിക്കേഷനുകൾക്ക് അനുയോജ്യമാക്കുന്നു, കൂടുതൽ വിശ്വസനീയവും കൃത്യവുമായ നാവിഗേഷൻ പരിഹാരങ്ങൾക്ക് സംഭാവന നൽകുന്നു.
സ്റ്റെബിലൈസ്ഡ് പ്ലാറ്റ്ഫോം vs. സ്ട്രാപ്പ്-ഡൗൺ INS
സ്റ്റെബിലൈസ്ഡ് പ്ലാറ്റ്ഫോമും സ്ട്രാപ്പ്-ഡൗൺ സിസ്റ്റങ്ങളും ഉൾപ്പെടുത്തി ഐഎൻഎസ് സാങ്കേതികവിദ്യകൾ വികസിച്ചു. മെക്കാനിക്കൽ സങ്കീർണ്ണതയും ധരിക്കാനുള്ള സാധ്യതയും ഉണ്ടായിരുന്നിട്ടും, സ്റ്റെബിലൈസ്ഡ് പ്ലാറ്റ്ഫോം ഐഎൻഎസുകൾ അനലോഗ് ഡാറ്റ സംയോജനത്തിലൂടെ ശക്തമായ പ്രകടനം നൽകുന്നു.മറുവശത്ത്, സ്ട്രാപ്പ്-ഡൗൺ INS സിസ്റ്റങ്ങൾ RLG-കളുടെ ഒതുക്കമുള്ളതും അറ്റകുറ്റപ്പണികളില്ലാത്തതുമായ സ്വഭാവത്തിൽ നിന്ന് പ്രയോജനം നേടുന്നു, ഇത് ചെലവ്-ഫലപ്രാപ്തിയും കൃത്യതയും കാരണം ആധുനിക വിമാനങ്ങൾക്ക് അവയെ തിരഞ്ഞെടുക്കാനുള്ള ഒരു തിരഞ്ഞെടുപ്പാക്കി മാറ്റുന്നു.
മിസൈൽ നാവിഗേഷൻ മെച്ചപ്പെടുത്തുന്നു
സ്മാർട്ട് യുദ്ധോപകരണങ്ങളുടെ മാർഗ്ഗനിർദ്ദേശ സംവിധാനങ്ങളിലും RLG-കൾ നിർണായക പങ്ക് വഹിക്കുന്നു. GPS വിശ്വസനീയമല്ലാത്ത സാഹചര്യങ്ങളിൽ, നാവിഗേഷന് RLG-കൾ വിശ്വസനീയമായ ഒരു ബദൽ നൽകുന്നു. അവയുടെ ചെറിയ വലിപ്പവും തീവ്ര ശക്തികളോടുള്ള പ്രതിരോധവും അവയെ മിസൈലുകൾക്കും പീരങ്കി ഷെല്ലുകൾക്കും അനുയോജ്യമാക്കുന്നു, ടോമാഹോക്ക് ക്രൂയിസ് മിസൈൽ, M982 എക്സാലിബർ പോലുള്ള സംവിധാനങ്ങൾ ഇതിന് ഉദാഹരണമാണ്.

മൗണ്ടുകൾ ഉപയോഗിച്ചുള്ള ഗിംബാൾഡ് ഇനേർഷ്യൽ സ്റ്റെബിലൈസ്ഡ് പ്ലാറ്റ്ഫോമിന്റെ ഉദാഹരണത്തിന്റെ ഡയഗ്രം. എഞ്ചിനീയറിംഗ് 360 ന്റെ കടപ്പാട്.
നിരാകരണം:
- ഞങ്ങളുടെ വെബ്സൈറ്റിൽ പ്രദർശിപ്പിച്ചിരിക്കുന്ന ചില ചിത്രങ്ങൾ ഇന്റർനെറ്റിൽ നിന്നും വിക്കിപീഡിയയിൽ നിന്നും ശേഖരിച്ചതാണെന്നും വിദ്യാഭ്യാസവും വിവര പങ്കുവെക്കലും പ്രോത്സാഹിപ്പിക്കുക എന്ന ലക്ഷ്യത്തോടെയാണെന്നും ഞങ്ങൾ ഇതിനാൽ പ്രഖ്യാപിക്കുന്നു. എല്ലാ സ്രഷ്ടാക്കളുടെയും ബൗദ്ധിക സ്വത്തവകാശത്തെ ഞങ്ങൾ മാനിക്കുന്നു. ഈ ചിത്രങ്ങളുടെ ഉപയോഗം വാണിജ്യ നേട്ടത്തിനായി ഉദ്ദേശിച്ചുള്ളതല്ല.
- ഉപയോഗിക്കുന്ന ഏതെങ്കിലും ഉള്ളടക്കം നിങ്ങളുടെ പകർപ്പവകാശം ലംഘിക്കുന്നതായി നിങ്ങൾ വിശ്വസിക്കുന്നുവെങ്കിൽ, ദയവായി ഞങ്ങളെ ബന്ധപ്പെടുക. ബൗദ്ധിക സ്വത്തവകാശ നിയമങ്ങളും ചട്ടങ്ങളും പാലിക്കുന്നുണ്ടെന്ന് ഉറപ്പാക്കാൻ, ചിത്രങ്ങൾ നീക്കം ചെയ്യുകയോ ശരിയായ ആട്രിബ്യൂഷൻ നൽകുകയോ ഉൾപ്പെടെയുള്ള ഉചിതമായ നടപടികൾ സ്വീകരിക്കാൻ ഞങ്ങൾ തയ്യാറാണ്. ഉള്ളടക്കത്താൽ സമ്പന്നവും, ന്യായയുക്തവും, മറ്റുള്ളവരുടെ ബൗദ്ധിക സ്വത്തവകാശങ്ങളെ ബഹുമാനിക്കുന്നതുമായ ഒരു പ്ലാറ്റ്ഫോം നിലനിർത്തുക എന്നതാണ് ഞങ്ങളുടെ ലക്ഷ്യം.
- ഇനിപ്പറയുന്ന ഇമെയിൽ വിലാസത്തിൽ ഞങ്ങളെ ബന്ധപ്പെടുക:sales@lumispot.cn. എന്തെങ്കിലും അറിയിപ്പ് ലഭിച്ചാൽ ഉടനടി നടപടി സ്വീകരിക്കാൻ ഞങ്ങൾ പ്രതിജ്ഞാബദ്ധരാണ്, കൂടാതെ അത്തരം പ്രശ്നങ്ങൾ പരിഹരിക്കുന്നതിന് 100% സഹകരണവും ഉറപ്പ് നൽകുന്നു.
പോസ്റ്റ് സമയം: ഏപ്രിൽ-01-2024