അന്തരീക്ഷ കണ്ടെത്തൽ രീതികൾ
അന്തരീക്ഷ കണ്ടെത്തലിന്റെ പ്രധാന രീതികൾ ഇവയാണ്: മൈക്രോവേവ് റഡാർ സൗണ്ടിംഗ് രീതി, എയർബോൺ അല്ലെങ്കിൽ റോക്കറ്റ് സൗണ്ടിംഗ് രീതി, സൗണ്ടിംഗ് ബലൂൺ, സാറ്റലൈറ്റ് റിമോട്ട് സെൻസിംഗ്, LIDAR. അന്തരീക്ഷത്തിലേക്ക് അയയ്ക്കുന്ന മൈക്രോവേവുകൾ മില്ലിമീറ്റർ അല്ലെങ്കിൽ സെന്റിമീറ്റർ തരംഗങ്ങളായതിനാൽ, ദീർഘതരംഗദൈർഘ്യമുള്ളതും ചെറിയ കണങ്ങളുമായി, പ്രത്യേകിച്ച് വിവിധ തന്മാത്രകളുമായി സംവദിക്കാൻ കഴിയാത്തതുമായതിനാൽ മൈക്രോവേവ് റഡാറിന് ചെറിയ കണങ്ങളെ കണ്ടെത്താൻ കഴിയില്ല.
വായുവിലൂടെയുള്ള ശബ്ദ പരിശോധന, റോക്കറ്റ് ശബ്ദ പരിശോധന രീതികൾ കൂടുതൽ ചെലവേറിയതും ദീർഘകാലത്തേക്ക് നിരീക്ഷിക്കാൻ കഴിയാത്തതുമാണ്. ബലൂണുകളുടെ സൗണ്ടിംഗ് ചെലവ് കുറവാണെങ്കിലും, കാറ്റിന്റെ വേഗതയാണ് അവയെ കൂടുതൽ ബാധിക്കുന്നത്. ഓൺ-ബോർഡ് റഡാർ ഉപയോഗിച്ച് ഉപഗ്രഹ റിമോട്ട് സെൻസിംഗിന് ആഗോള അന്തരീക്ഷം വലിയ തോതിൽ കണ്ടെത്താൻ കഴിയും, എന്നാൽ സ്പേഷ്യൽ റെസല്യൂഷൻ താരതമ്യേന കുറവാണ്. അന്തരീക്ഷത്തിലേക്ക് ഒരു ലേസർ ബീം പുറപ്പെടുവിച്ചും അന്തരീക്ഷ തന്മാത്രകൾ അല്ലെങ്കിൽ എയറോസോളുകൾ, ലേസർ എന്നിവ തമ്മിലുള്ള പ്രതിപ്രവർത്തനം (വിസരണം, ആഗിരണം) ഉപയോഗിച്ചും അന്തരീക്ഷ പാരാമീറ്ററുകൾ വേർതിരിച്ചെടുക്കാൻ ലിഡാർ ഉപയോഗിക്കുന്നു.
ലേസറിന്റെ ശക്തമായ ദിശാബോധം, ഹ്രസ്വ തരംഗദൈർഘ്യം (മൈക്രോൺ തരംഗം), ഇടുങ്ങിയ പൾസ് വീതി, ഫോട്ടോഡിറ്റക്ടറിന്റെ (ഫോട്ടോമൾട്ടിപ്ലയർ ട്യൂബ്, സിംഗിൾ ഫോട്ടോൺ ഡിറ്റക്ടർ) ഉയർന്ന സംവേദനക്ഷമത എന്നിവ കാരണം, ലിഡാറിന് അന്തരീക്ഷ പാരാമീറ്ററുകളുടെ ഉയർന്ന കൃത്യതയും ഉയർന്ന സ്പേഷ്യൽ, ടെമ്പറൽ റെസല്യൂഷനും കണ്ടെത്താനാകും. ഉയർന്ന കൃത്യത, ഉയർന്ന സ്പേഷ്യൽ, ടെമ്പറൽ റെസല്യൂഷൻ, തുടർച്ചയായ നിരീക്ഷണം എന്നിവ കാരണം, അന്തരീക്ഷ എയറോസോളുകൾ, മേഘങ്ങൾ, വായു മലിനീകരണ വസ്തുക്കൾ, അന്തരീക്ഷ താപനില, കാറ്റിന്റെ വേഗത എന്നിവ കണ്ടെത്തുന്നതിൽ LIDAR അതിവേഗം വികസിച്ചുകൊണ്ടിരിക്കുന്നു.
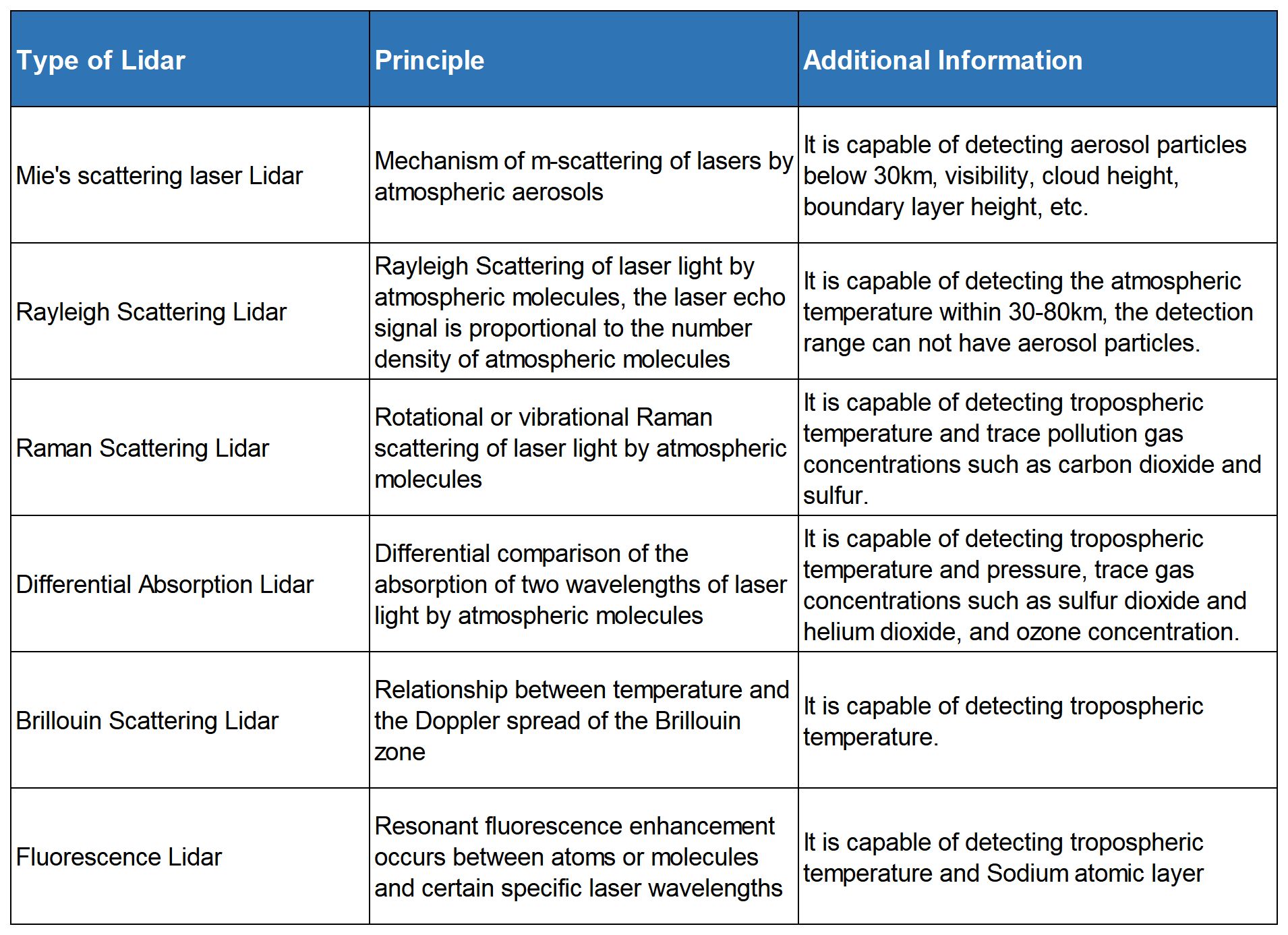
ലിഡാറിന്റെ തരങ്ങൾ താഴെ പട്ടികയിൽ കാണിച്ചിരിക്കുന്നു:
അന്തരീക്ഷ കണ്ടെത്തൽ രീതികൾ
അന്തരീക്ഷ കണ്ടെത്തലിന്റെ പ്രധാന രീതികൾ ഇവയാണ്: മൈക്രോവേവ് റഡാർ സൗണ്ടിംഗ് രീതി, എയർബോൺ അല്ലെങ്കിൽ റോക്കറ്റ് സൗണ്ടിംഗ് രീതി, സൗണ്ടിംഗ് ബലൂൺ, സാറ്റലൈറ്റ് റിമോട്ട് സെൻസിംഗ്, LIDAR. അന്തരീക്ഷത്തിലേക്ക് അയയ്ക്കുന്ന മൈക്രോവേവുകൾ മില്ലിമീറ്റർ അല്ലെങ്കിൽ സെന്റിമീറ്റർ തരംഗങ്ങളായതിനാൽ, ദീർഘതരംഗദൈർഘ്യമുള്ളതും ചെറിയ കണങ്ങളുമായി, പ്രത്യേകിച്ച് വിവിധ തന്മാത്രകളുമായി സംവദിക്കാൻ കഴിയാത്തതുമായതിനാൽ മൈക്രോവേവ് റഡാറിന് ചെറിയ കണങ്ങളെ കണ്ടെത്താൻ കഴിയില്ല.
വായുവിലൂടെയുള്ള ശബ്ദ പരിശോധന, റോക്കറ്റ് ശബ്ദ പരിശോധന രീതികൾ കൂടുതൽ ചെലവേറിയതും ദീർഘകാലത്തേക്ക് നിരീക്ഷിക്കാൻ കഴിയാത്തതുമാണ്. ബലൂണുകളുടെ സൗണ്ടിംഗ് ചെലവ് കുറവാണെങ്കിലും, കാറ്റിന്റെ വേഗതയാണ് അവയെ കൂടുതൽ ബാധിക്കുന്നത്. ഓൺ-ബോർഡ് റഡാർ ഉപയോഗിച്ച് ഉപഗ്രഹ റിമോട്ട് സെൻസിംഗിന് ആഗോള അന്തരീക്ഷം വലിയ തോതിൽ കണ്ടെത്താൻ കഴിയും, എന്നാൽ സ്പേഷ്യൽ റെസല്യൂഷൻ താരതമ്യേന കുറവാണ്. അന്തരീക്ഷത്തിലേക്ക് ഒരു ലേസർ ബീം പുറപ്പെടുവിച്ചും അന്തരീക്ഷ തന്മാത്രകൾ അല്ലെങ്കിൽ എയറോസോളുകൾ, ലേസർ എന്നിവ തമ്മിലുള്ള പ്രതിപ്രവർത്തനം (വിസരണം, ആഗിരണം) ഉപയോഗിച്ചും അന്തരീക്ഷ പാരാമീറ്ററുകൾ വേർതിരിച്ചെടുക്കാൻ ലിഡാർ ഉപയോഗിക്കുന്നു.
ലേസറിന്റെ ശക്തമായ ദിശാബോധം, ഹ്രസ്വ തരംഗദൈർഘ്യം (മൈക്രോൺ തരംഗം), ഇടുങ്ങിയ പൾസ് വീതി, ഫോട്ടോഡിറ്റക്ടറിന്റെ (ഫോട്ടോമൾട്ടിപ്ലയർ ട്യൂബ്, സിംഗിൾ ഫോട്ടോൺ ഡിറ്റക്ടർ) ഉയർന്ന സംവേദനക്ഷമത എന്നിവ കാരണം, ലിഡാറിന് അന്തരീക്ഷ പാരാമീറ്ററുകളുടെ ഉയർന്ന കൃത്യതയും ഉയർന്ന സ്പേഷ്യൽ, ടെമ്പറൽ റെസല്യൂഷനും കണ്ടെത്താനാകും. ഉയർന്ന കൃത്യത, ഉയർന്ന സ്പേഷ്യൽ, ടെമ്പറൽ റെസല്യൂഷൻ, തുടർച്ചയായ നിരീക്ഷണം എന്നിവ കാരണം, അന്തരീക്ഷ എയറോസോളുകൾ, മേഘങ്ങൾ, വായു മലിനീകരണ വസ്തുക്കൾ, അന്തരീക്ഷ താപനില, കാറ്റിന്റെ വേഗത എന്നിവ കണ്ടെത്തുന്നതിൽ LIDAR അതിവേഗം വികസിച്ചുകൊണ്ടിരിക്കുന്നു.
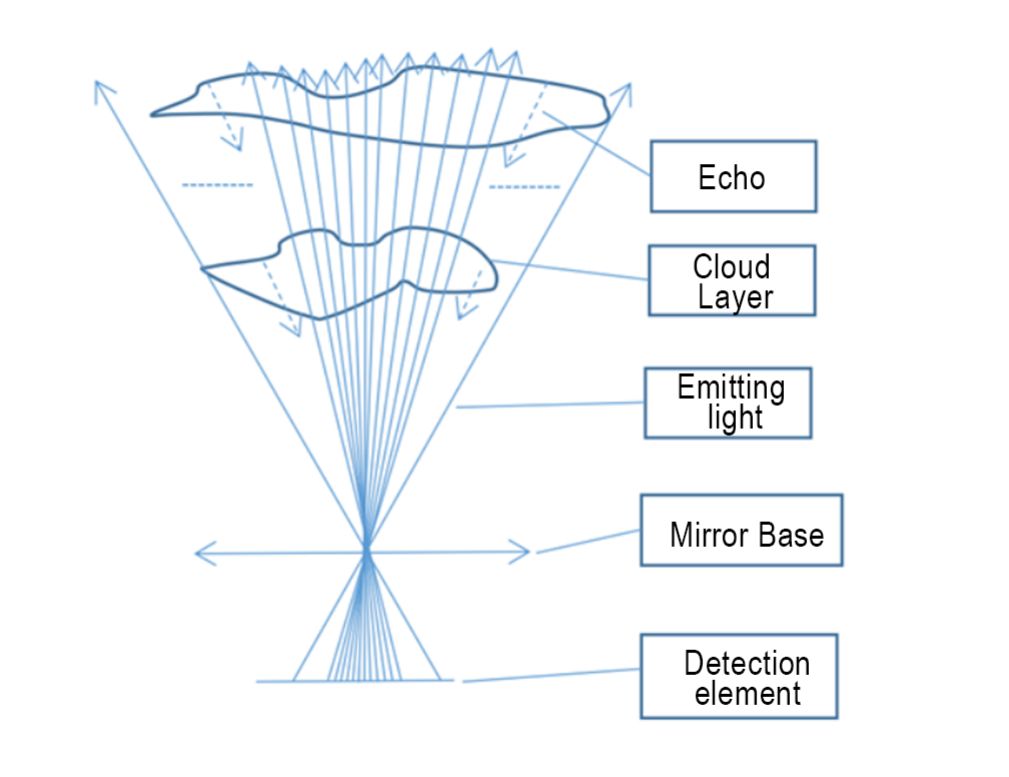
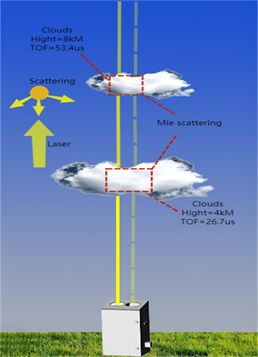
മേഘ അളക്കൽ റഡാറിന്റെ തത്വത്തിന്റെ സ്കീമാറ്റിക് ഡയഗ്രം
മേഘപാളി: വായുവിൽ പൊങ്ങിക്കിടക്കുന്ന ഒരു മേഘപാളി; പുറത്തുവിടുന്ന പ്രകാശം: ഒരു പ്രത്യേക തരംഗദൈർഘ്യമുള്ള ഒരു കോളിമേറ്റഡ് ബീം; പ്രതിധ്വനി: മേഘപാളിയിലൂടെ വികിരണം കടന്നുപോയതിനുശേഷം ഉണ്ടാകുന്ന ബാക്ക്സ്കാറ്റേർഡ് സിഗ്നൽ; മിറർ ബേസ്: ദൂരദർശിനി സംവിധാനത്തിന്റെ തുല്യമായ ഉപരിതലം; കണ്ടെത്തൽ ഘടകം: ദുർബലമായ പ്രതിധ്വനി സിഗ്നൽ സ്വീകരിക്കാൻ ഉപയോഗിക്കുന്ന ഫോട്ടോഇലക്ട്രിക് ഉപകരണം.
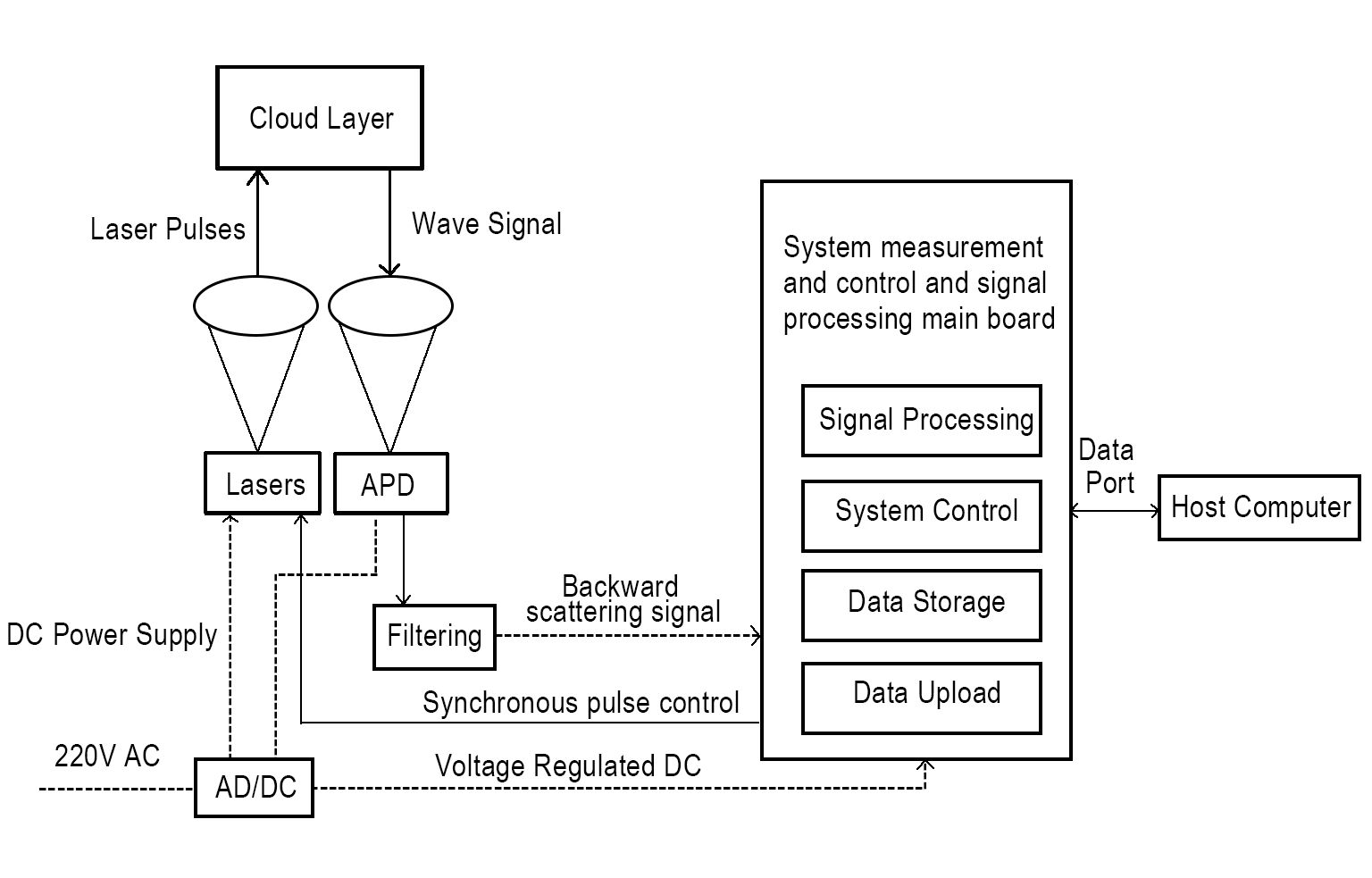
ക്ലൗഡ് മെഷർമെന്റ് റഡാർ സിസ്റ്റത്തിന്റെ പ്രവർത്തന ചട്ടക്കൂട്
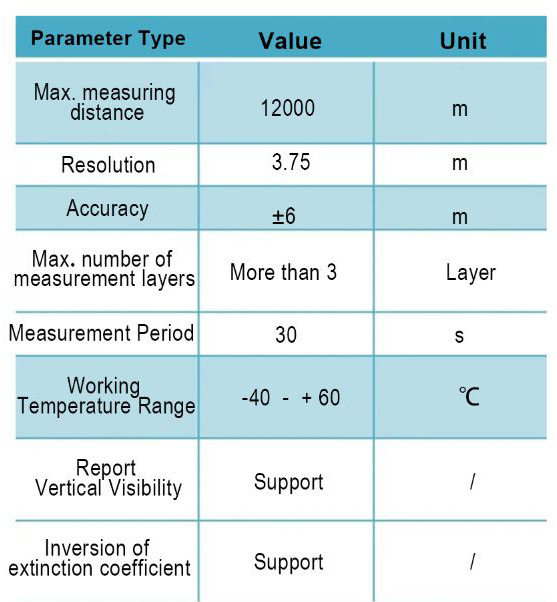
ക്ലൗഡ് മെഷർമെന്റ് ലിഡാറിന്റെ ലൂമിസ്പോട്ട് ടെക് പ്രധാന സാങ്കേതിക പാരാമീറ്ററുകൾ
ഉൽപ്പന്നത്തിന്റെ ചിത്രം

അപേക്ഷ

ഉൽപ്പന്നങ്ങളുടെ പ്രവർത്തന നില ഡയഗ്രം
പോസ്റ്റ് സമയം: മെയ്-09-2023