ആമുഖം
1960 കളുടെ അവസാനവും 1970 കളുടെ തുടക്കവും മുതൽ, മിക്ക പരമ്പരാഗത ഏരിയൽ ഫോട്ടോഗ്രാഫി സംവിധാനങ്ങളും എയർബോൺ, എയ്റോസ്പേസ് ഇലക്ട്രോ-ഒപ്റ്റിക്കൽ, ഇലക്ട്രോണിക് സെൻസർ സംവിധാനങ്ങളാൽ മാറ്റിസ്ഥാപിക്കപ്പെട്ടു. പരമ്പരാഗത ഏരിയൽ ഫോട്ടോഗ്രാഫി പ്രധാനമായും ദൃശ്യപ്രകാശ തരംഗദൈർഘ്യത്തിലാണ് പ്രവർത്തിക്കുന്നതെങ്കിലും, ആധുനിക എയർബോൺ, ഗ്രൗണ്ട് അധിഷ്ഠിത റിമോട്ട് സെൻസിംഗ് സിസ്റ്റങ്ങൾ ദൃശ്യപ്രകാശം, പ്രതിഫലിച്ച ഇൻഫ്രാറെഡ്, തെർമൽ ഇൻഫ്രാറെഡ്, മൈക്രോവേവ് സ്പെക്ട്രൽ മേഖലകൾ എന്നിവ ഉൾക്കൊള്ളുന്ന ഡിജിറ്റൽ ഡാറ്റ ഉത്പാദിപ്പിക്കുന്നു. ഏരിയൽ ഫോട്ടോഗ്രാഫിയിലെ പരമ്പരാഗത ദൃശ്യ വ്യാഖ്യാന രീതികൾ ഇപ്പോഴും സഹായകരമാണ്. എന്നിരുന്നാലും, ലക്ഷ്യ ഗുണങ്ങളുടെ സൈദ്ധാന്തിക മോഡലിംഗ്, വസ്തുക്കളുടെ സ്പെക്ട്രൽ അളവുകൾ, വിവരങ്ങൾ വേർതിരിച്ചെടുക്കുന്നതിനുള്ള ഡിജിറ്റൽ ഇമേജ് വിശകലനം തുടങ്ങിയ അധിക പ്രവർത്തനങ്ങൾ ഉൾപ്പെടെ, വിശാലമായ ആപ്ലിക്കേഷനുകൾ റിമോട്ട് സെൻസിംഗ് ഉൾക്കൊള്ളുന്നു.
നോൺ-കോൺടാക്റ്റ് ലോംഗ്-റേഞ്ച് ഡിറ്റക്ഷൻ ടെക്നിക്കുകളുടെ എല്ലാ വശങ്ങളെയും പരാമർശിക്കുന്ന റിമോട്ട് സെൻസിംഗ്, ഒരു ലക്ഷ്യത്തിന്റെ സവിശേഷതകൾ കണ്ടെത്തുന്നതിനും രേഖപ്പെടുത്തുന്നതിനും അളക്കുന്നതിനും വൈദ്യുതകാന്തികത ഉപയോഗിക്കുന്ന ഒരു രീതിയാണ്, ഈ നിർവചനം ആദ്യമായി നിർദ്ദേശിക്കപ്പെട്ടത് 1950 കളിലാണ്. റിമോട്ട് സെൻസിംഗിന്റെയും മാപ്പിംഗിന്റെയും മേഖലയെ രണ്ട് സെൻസിംഗ് മോഡുകളായി തിരിച്ചിരിക്കുന്നു: സജീവവും നിഷ്ക്രിയവുമായ സെൻസിംഗ്, ഇതിൽ ലിഡാർ സെൻസിംഗ് സജീവമാണ്, ലക്ഷ്യത്തിലേക്ക് പ്രകാശം പുറപ്പെടുവിക്കുന്നതിനും അതിൽ നിന്ന് പ്രതിഫലിക്കുന്ന പ്രകാശം കണ്ടെത്തുന്നതിനും സ്വന്തം ഊർജ്ജം ഉപയോഗിക്കാൻ കഴിയും.
സജീവ ലിഡാർ സെൻസിംഗും പ്രയോഗവും
ലേസർ സിഗ്നലുകൾ പുറപ്പെടുവിക്കുകയും സ്വീകരിക്കുകയും ചെയ്യുന്ന സമയത്തെ അടിസ്ഥാനമാക്കി ദൂരം അളക്കുന്ന ഒരു സാങ്കേതികവിദ്യയാണ് ലിഡാർ (പ്രകാശ കണ്ടെത്തലും റേഞ്ചിംഗും). ചിലപ്പോൾ എയർബോൺ ലിഡാർ എയർബോൺ ലേസർ സ്കാനിംഗ്, മാപ്പിംഗ് അല്ലെങ്കിൽ ലിഡാർ എന്നിവയുമായി പരസ്പരം മാറ്റി പ്രയോഗിക്കുന്നു.
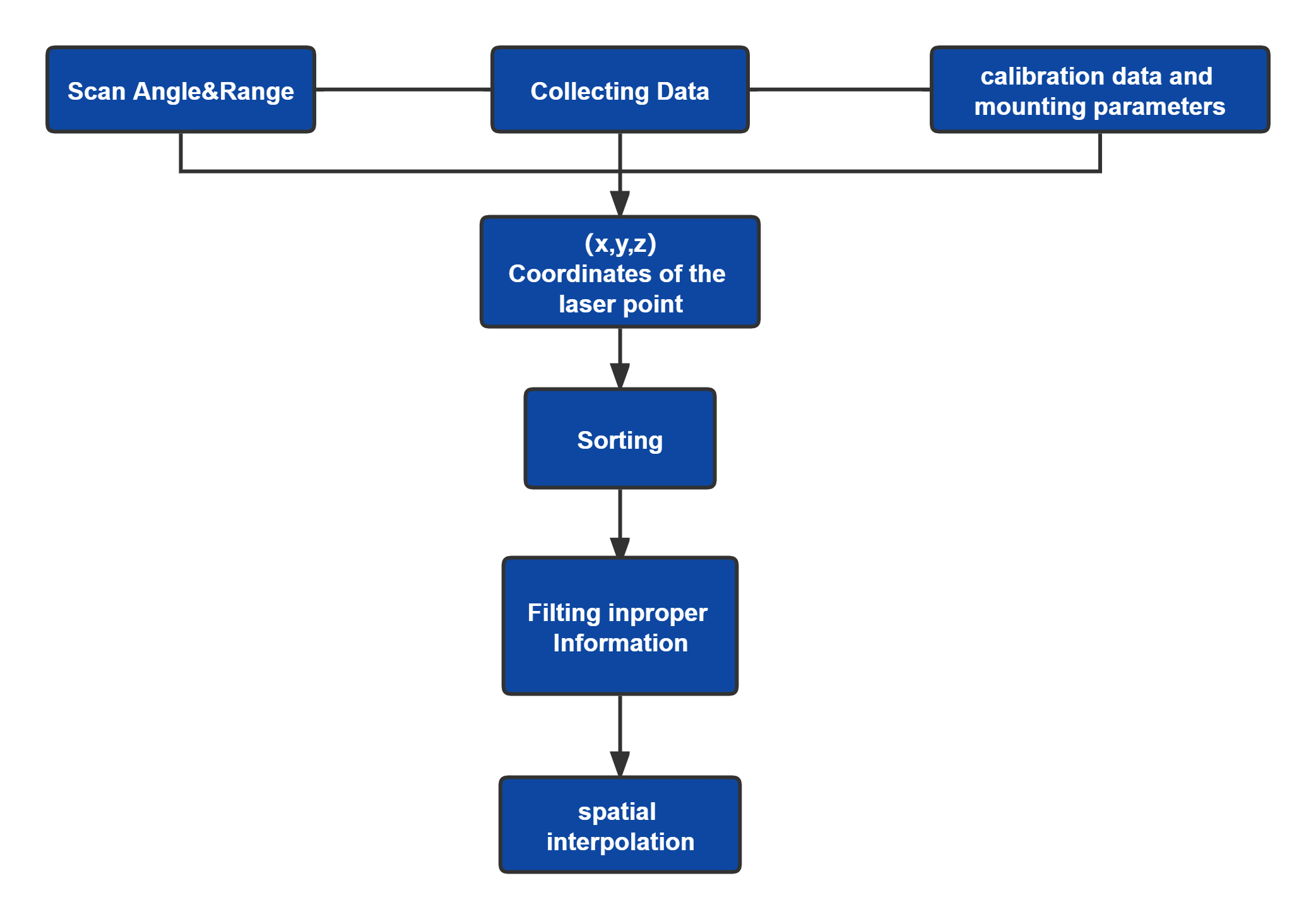
LiDAR ഉപയോഗ സമയത്ത് പോയിന്റ് ഡാറ്റ പ്രോസസ്സിംഗിന്റെ പ്രധാന ഘട്ടങ്ങൾ കാണിക്കുന്ന ഒരു സാധാരണ ഫ്ലോചാർട്ടാണിത്. ( x, y, z ) കോർഡിനേറ്റുകൾ ശേഖരിച്ച ശേഷം, ഈ പോയിന്റുകൾ അടുക്കുന്നത് ഡാറ്റ റെൻഡറിംഗിന്റെയും പ്രോസസ്സിംഗിന്റെയും കാര്യക്ഷമത മെച്ചപ്പെടുത്തും. LiDAR പോയിന്റുകളുടെ ജ്യാമിതീയ പ്രോസസ്സിംഗിനു പുറമേ, LiDAR ഫീഡ്ബാക്കിൽ നിന്നുള്ള തീവ്രത വിവരങ്ങളും ഉപയോഗപ്രദമാണ്.
എല്ലാ റിമോട്ട് സെൻസിംഗ്, മാപ്പിംഗ് ആപ്ലിക്കേഷനുകളിലും, സൂര്യപ്രകാശം, മറ്റ് കാലാവസ്ഥാ പ്രത്യാഘാതങ്ങൾ എന്നിവ കണക്കിലെടുക്കാതെ കൂടുതൽ കൃത്യമായ അളവുകൾ നേടുക എന്നതാണ് LiDAR-ന് സവിശേഷമായ നേട്ടം. ഒരു സാധാരണ റിമോട്ട് സെൻസിംഗ് സിസ്റ്റത്തിന് രണ്ട് ഭാഗങ്ങളാണുള്ളത്, ഒരു ലേസർ റേഞ്ച്ഫൈൻഡർ, സ്ഥാനനിർണ്ണയത്തിനുള്ള ഒരു മെഷർമെന്റ് സെൻസർ. ഇമേജിംഗ് ഉൾപ്പെടാത്തതിനാൽ (3D ലോകം 2D തലത്തിലാണ് ചിത്രീകരിക്കുന്നത്) ജ്യാമിതീയ വികലതയില്ലാതെ 3D-യിൽ ഭൂമിശാസ്ത്രപരമായ പരിസ്ഥിതിയെ നേരിട്ട് അളക്കാൻ ഇതിന് കഴിയും.
ഞങ്ങളുടെ ലിഡാർ ഉറവിടങ്ങളിൽ ചിലത്
സെൻസറിനുള്ള കണ്ണിന് സുരക്ഷിതമായ LiDAR ലേസർ സോഴ്സ് ചോയ്സുകൾ


