ആമുഖം
1960-കളുടെ അവസാനവും 1970-കളുടെ തുടക്കവും മുതൽ, മിക്ക പരമ്പരാഗത ഏരിയൽ ഫോട്ടോഗ്രാഫി സംവിധാനങ്ങളും എയർബോൺ, എയ്റോസ്പേസ് ഇലക്ട്രോ-ഒപ്റ്റിക്കൽ, ഇലക്ട്രോണിക് സെൻസർ സംവിധാനങ്ങളാൽ മാറ്റിസ്ഥാപിക്കപ്പെട്ടു. പരമ്പരാഗത ഏരിയൽ ഫോട്ടോഗ്രാഫി പ്രാഥമികമായി ദൃശ്യ-പ്രകാശ തരംഗദൈർഘ്യത്തിലാണ് പ്രവർത്തിക്കുന്നത്, ആധുനിക വായുവിലൂടെയുള്ളതും ഭൂമിയെ അടിസ്ഥാനമാക്കിയുള്ളതുമായ റിമോട്ട് സെൻസിംഗ് സംവിധാനങ്ങൾ ദൃശ്യപ്രകാശം, പ്രതിഫലിക്കുന്ന ഇൻഫ്രാറെഡ്, തെർമൽ ഇൻഫ്രാറെഡ്, മൈക്രോവേവ് സ്പെക്ട്രൽ മേഖലകൾ എന്നിവ ഉൾക്കൊള്ളുന്ന ഡിജിറ്റൽ ഡാറ്റ നിർമ്മിക്കുന്നു. ഏരിയൽ ഫോട്ടോഗ്രാഫിയിലെ പരമ്പരാഗത ദൃശ്യ വ്യാഖ്യാന രീതികൾ ഇപ്പോഴും സഹായകരമാണ്. എന്നിരുന്നാലും, ടാർഗെറ്റ് പ്രോപ്പർട്ടികളുടെ സൈദ്ധാന്തിക മോഡലിംഗ്, ഒബ്ജക്റ്റുകളുടെ സ്പെക്ട്രൽ അളവുകൾ, വിവരങ്ങൾ വേർതിരിച്ചെടുക്കുന്നതിനുള്ള ഡിജിറ്റൽ ഇമേജ് വിശകലനം എന്നിവ പോലുള്ള അധിക പ്രവർത്തനങ്ങൾ ഉൾപ്പെടെ വിപുലമായ ആപ്ലിക്കേഷനുകൾ റിമോട്ട് സെൻസിംഗ് ഉൾക്കൊള്ളുന്നു.
നോൺ-കോൺടാക്റ്റ് ലോംഗ്-റേഞ്ച് ഡിറ്റക്ഷൻ ടെക്നിക്കുകളുടെ എല്ലാ വശങ്ങളെയും പരാമർശിക്കുന്ന റിമോട്ട് സെൻസിംഗ്, ഒരു ടാർഗെറ്റിൻ്റെ സവിശേഷതകൾ കണ്ടെത്തുന്നതിനും രേഖപ്പെടുത്തുന്നതിനും അളക്കുന്നതിനും വൈദ്യുതകാന്തികത ഉപയോഗിക്കുന്ന ഒരു രീതിയാണ്, 1950 കളിലാണ് നിർവചനം ആദ്യമായി നിർദ്ദേശിച്ചത്. റിമോട്ട് സെൻസിംഗിൻ്റെയും മാപ്പിംഗിൻ്റെയും ഫീൽഡ്, ഇത് 2 സെൻസിംഗ് മോഡുകളായി തിരിച്ചിരിക്കുന്നു: സജീവവും നിഷ്ക്രിയവുമായ സെൻസിംഗ്, അതിൽ ലിഡാർ സെൻസിംഗ് സജീവമാണ്, ലക്ഷ്യത്തിലേക്ക് പ്രകാശം പുറപ്പെടുവിക്കാനും അതിൽ നിന്ന് പ്രതിഫലിക്കുന്ന പ്രകാശം കണ്ടെത്താനും സ്വന്തം ഊർജ്ജം ഉപയോഗിക്കാൻ കഴിയും.
സജീവ ലിഡാർ സെൻസിംഗും ആപ്ലിക്കേഷനും
ലേസർ സിഗ്നലുകൾ പുറപ്പെടുവിക്കുകയും സ്വീകരിക്കുകയും ചെയ്യുന്ന സമയത്തെ അടിസ്ഥാനമാക്കി ദൂരം അളക്കുന്ന ഒരു സാങ്കേതികവിദ്യയാണ് ലിഡാർ (ലൈറ്റ് ഡിറ്റക്ഷനും റേഞ്ചിംഗും). ചിലപ്പോൾ എയർബോൺ ലേസർ സ്കാനിംഗ്, മാപ്പിംഗ്, അല്ലെങ്കിൽ LiDAR എന്നിവയ്ക്ക് പകരം എയർബോൺ ലിഡാർ പ്രയോഗിക്കുന്നു.
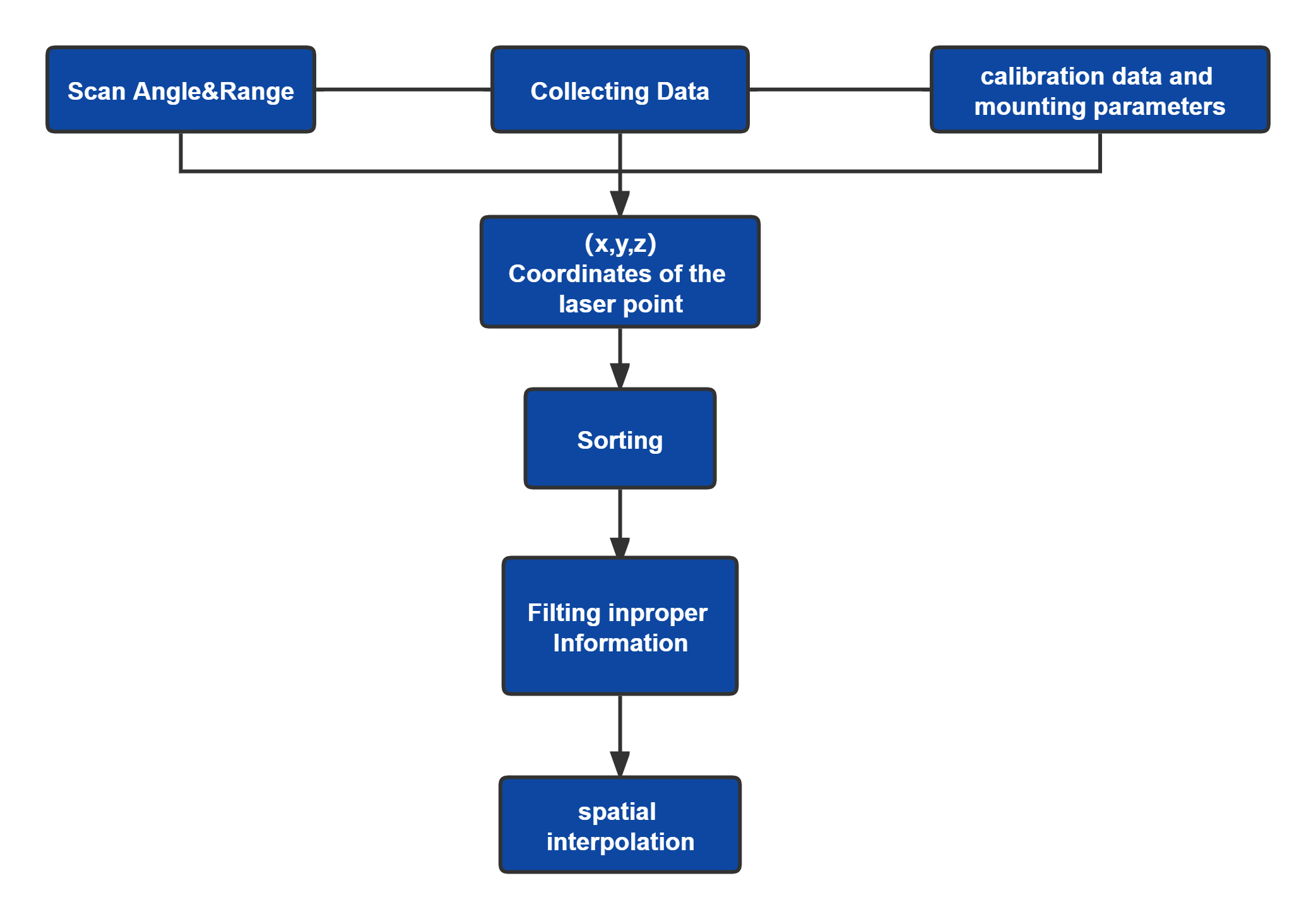
LiDAR ഉപയോഗ സമയത്ത് പോയിൻ്റ് ഡാറ്റ പ്രോസസ്സിംഗിൻ്റെ പ്രധാന ഘട്ടങ്ങൾ കാണിക്കുന്ന ഒരു സാധാരണ ഫ്ലോചാർട്ട് ആണിത്. (x, y, z) കോർഡിനേറ്റുകൾ ശേഖരിച്ച ശേഷം, ഈ പോയിൻ്റുകൾ അടുക്കുന്നത് ഡാറ്റ റെൻഡറിംഗിൻ്റെയും പ്രോസസ്സിംഗിൻ്റെയും കാര്യക്ഷമത വർദ്ധിപ്പിക്കും. LiDAR പോയിൻ്റുകളുടെ ജ്യാമിതീയ പ്രോസസ്സിംഗിന് പുറമേ, LiDAR ഫീഡ്ബാക്കിൽ നിന്നുള്ള തീവ്രത വിവരങ്ങളും ഉപയോഗപ്രദമാണ്.
എല്ലാ റിമോട്ട് സെൻസിംഗ്, മാപ്പിംഗ് ആപ്ലിക്കേഷനുകളിലും, സൂര്യപ്രകാശത്തിൽ നിന്നും മറ്റ് കാലാവസ്ഥാ ഇഫക്റ്റുകളിൽ നിന്നും സ്വതന്ത്രമായി കൂടുതൽ കൃത്യമായ അളവുകൾ നേടുന്നതിനുള്ള പ്രത്യേക നേട്ടം LiDAR-നുണ്ട്. ഒരു സാധാരണ റിമോട്ട് സെൻസിംഗ് സിസ്റ്റത്തിൽ രണ്ട് ഭാഗങ്ങൾ അടങ്ങിയിരിക്കുന്നു, ഒരു ലേസർ റേഞ്ച്ഫൈൻഡറും പൊസിഷനിംഗിനുള്ള ഒരു മെഷർമെൻ്റ് സെൻസറും, ഒരു ഇമേജിംഗും ഉൾപ്പെടാത്തതിനാൽ (3D ലോകം 2D വിമാനത്തിൽ ചിത്രീകരിച്ചിരിക്കുന്നു) ജ്യാമിതീയ വികലമാക്കാതെ ഭൂമിശാസ്ത്രപരമായ അന്തരീക്ഷം 3D-യിൽ നേരിട്ട് അളക്കാൻ കഴിയും.
ഞങ്ങളുടെ ലിഡാർ ഉറവിടത്തിൽ ചിലത്
സെൻസറിനായി കണ്ണിന് സുരക്ഷിതമായ LiDAR ലേസർ സോഴ്സ് ചോയ്സുകൾ


